












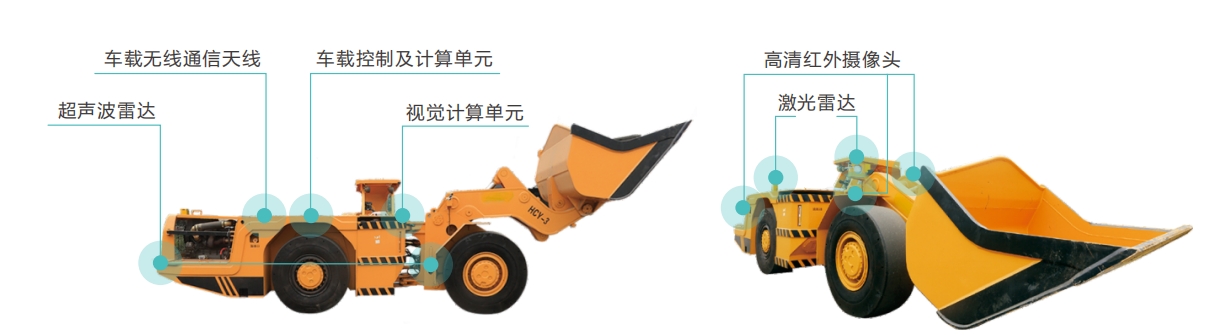
地下车辆自动驾驶系统
地下车辆自动驾驶系统利用先进的传感器技术、人工智能与智能控制技术,实现了地下车辆自主行走与无人驾驶,利用先进的无线通信技术、远程遥控及可视化技术实现铲运机地下矿料卸载精准作业。

系统功能

3D 环境感知与建模 搭载多线束激光雷达实时对巷道进行扫描建模并形成可视化地图,对四周环境进行感知和对车辆行驶进行跟踪。 |
任务路径自主规划智能决策 系统通过示教过程实时采集环境感知数据、定位数据、作业路 |
|
监测维护 实时故障诊断及可视化声光文字提示,帮助快速锁定故障点及故障状态,集成维护保养提醒,定期预见性维护和检修,减少设备维护时间,提高有效作业时间。 |
精准鲁棒跟踪控制 采用高精度、强实时、高可靠的线控转向与驱制动技术,对铲 |

远程接管 远程多功能驾驶平台,包含驾驶座椅左右扶手集成原车操作按钮、手柄、踏板,还原真实驾驶舱操作,全液晶显示屏用来显示井下车辆实时定位信息、行驶速度、栏位信息、爬坡角度等,行驶地图、路径以及监控摄像头的多视角实时画面,操作人员可对井下车辆进行随时接管操作。 |
作业统计 实际作业数据统计,自动进行出矿产量跟踪,生产作业日报表、周报表、月报表、月报表供生产参考决策。 |
|
多源感知目标检测和识别 通过激光雷达与立体相机实时感知环境数据,采用图像识别技
|
安全 自动行驶过程中,当有如下情况,车辆暂停运行:激光雷达或 |



我们能帮忙找点什么
服务热线
地址:长沙高新开发区岳麓西大道2450号环创园C-3栋
版权所有 © 2025 湖南创远高新机械有限责任公司